Behaviour Layer
This layer of the SP model controls the decision making processes of the simulated pedestrians. Specifically, it is responsible for selecting an appropriate maneuver to be executed by the pedestrian at each simulation time step. This process uses Behaviour Trees as a control architecture to determine a maneuver based on a set of predefined conditions. For information on the node structure and Domain-Specific Language (DSL) used to construct behaviour trees, see the vehicle Behaviour Layer page.
Condition Nodes
Condition nodes are used to guide the decision made by the behaviour tree given the current environmental context. Each node contains a Boolean condition linked to an evaluation function in the model that provides information about the current context.
Below are examples of condition function implemented in the current version of the model. This list can be expanded by future users to fit their scenario requirements.
Note: In the table below, target crosswalk refers to a crosswalk that the pedestrian has already decided to take but has not necessarily entered or crossed it yet.
| Condition | Attributes | Description |
|---|---|---|
| Reached goal | threshold_distance (m) | True if pedestrian is within the threshold_distance from its goal point |
| Has target crosswalk | - | True if pedestrian has selected a target crosswalk |
| Approaching target crosswalk | threshold_distance (m) | True if pedestrian is within the threshold_distance from its target crosswalk entrance point |
| At target crosswalk entrance/exit (two separate conditions) |
threshold_distance (m) | True if pedestrian is within the threshold_distance from its target crosswalk entrance/exit point |
| Waiting at target crosswalk entrance | - | True if pedestrian is at target crosswalk entrance but must wait to enter (due to light or obstruction) |
| Target crosswalk has signal | - | True if the target crosswalk has a crossing signal |
| Crossing signal is green/red/yellow (three separate conditions) |
- | True if the crossing signal for the target crosswalk is green/red/yellow |
| Can cross before crossing light turns red | speed_increase_% (s) distance_from_exit (m) |
True if the pedestrian can reach a point in the crosswalk within distance_from_exit from the exit with a speed_increase_% of their current speed. In Equation 1, this condition is true if ttoCross is less than or equal to the time to the next red light. |
| Vehicle approaching crosswalk | threshold_distance (m) | True if there is a vehicle in motion approaching (within threshold_distance from) the pedestrian's target crosswalk |
Equation 1
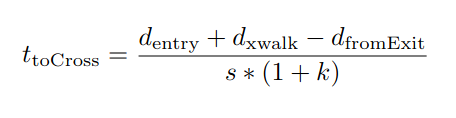
dentry is the distance from the pedestrian's position to the crosswalk entrance
dxwalk is the distance between the crosswalk's entrance and exit
dfromExit is the acceptable distance_from_exit to be considered fully crossed
s is the pedestrian's desired walking speed
k is the speed_increase_%
Maneuver Nodes
Maneuver nodes contain actions the pedestrian can execute. The pedestrian's behaviour tree selects an appropriate maneuver to be executed at each simulation time step. The main properties affected by a maneuver are the current waypoint, the desired speed, and the walking direction unit vector (which does not necessarily point to the waypoint).
Below is a list of currently implemented maneuvers. As with the conditions, this list is not exhaustive and may be extended to fit the scenario requirements.
| Maneuver | Description |
|---|---|
| Keep in Lane | Walk towards current waypoint following the general shape of the occupied lanelet |
| Stop | Set desired walking speed to 0 |
| Enter Crosswalk | Update waypoint to be the crosswalk's exit point |
| Exit Crosswalk | Run Waypoint Selection Algorithm to determine next waypoint (dependent on goal point and road structure) |
| Wait at Crosswalk | Pedestrian has already chosen to take the crosswalk but cannot enter yet. Waypoint is still the crosswalk entrance point until pedestrian executes Enter Crosswalk. |
| Select Crosswalk by Light State | Pedestrian decides which crosswalk to take, possibly given multiple candidates. Factors in the decision include the goal point (to determine the list of candidates), the pedestrian's level of aggressiveness, and the current light states of candidate crosswalks. |
Once a maneuver is selected by the behaviour tree, it is passed to the model's lower layers (Maneuver Layer and Motion Planner layer) for processing. The Maneuver layer translates the selected maneuver into low-level instructions to feed into the Social Force model component of the Motion Planner layer. The Motion Planner layer receives these instructions, runs an iteration of the Social Force model, and outputs the pedestrian's next state vector. The model then directly updates the pedestrian's new state information in the environment for the next simulation cycle.